


ربات های سفت و سخت معمولا سعی می کنند مانند حیوانات با دنیا کنار بیایند.
مواد نرم و انعطاف پذیر که بهتر از ماهیچه های طبیعی تقلید می کنند. محققان روباتیک از آنها به عنوان کلیدی برای ساخت ماشینهای سازگارتر استقبال میکنند، اما چون میتوانند به روشهای مختلف حرکت کنند، کنترل آنها بسیار دشوار است.
به گزارش ایسنا، «ماتیا گازولا»، استاد مهندسی مکانیک دانشگاه ایلینوی در Urbana-Champaign (UIUC) از طبیعت الهام گرفته است.
گازولا گفت، همه انواع موجودات از ترفندهایی برای به حداقل رساندن نیازهای محاسباتی خود استفاده می کنند. این هوش مکانیکی در خود بدن وجود دارد.
هیچ حیوانی به اندازه اختاپوس هماهنگی اندام های نرم خود را ندارد. اختاپوس ها به دلیل هوش و خلاقیت خود مشهور هستند.
این موجودات دارای یک سیستم عصبی بسیار پراکنده هستند و بدن حباب مانند آنها مغزی را در خود جای داده است که عملکردهای سطح بالایی مانند یادگیری و تصمیم گیری را انجام می دهد. بافت عصبی در هر اندام به تنهایی دستورات حرکتی اساسی را انجام می دهد.
شگفتی یادگیری ماشین
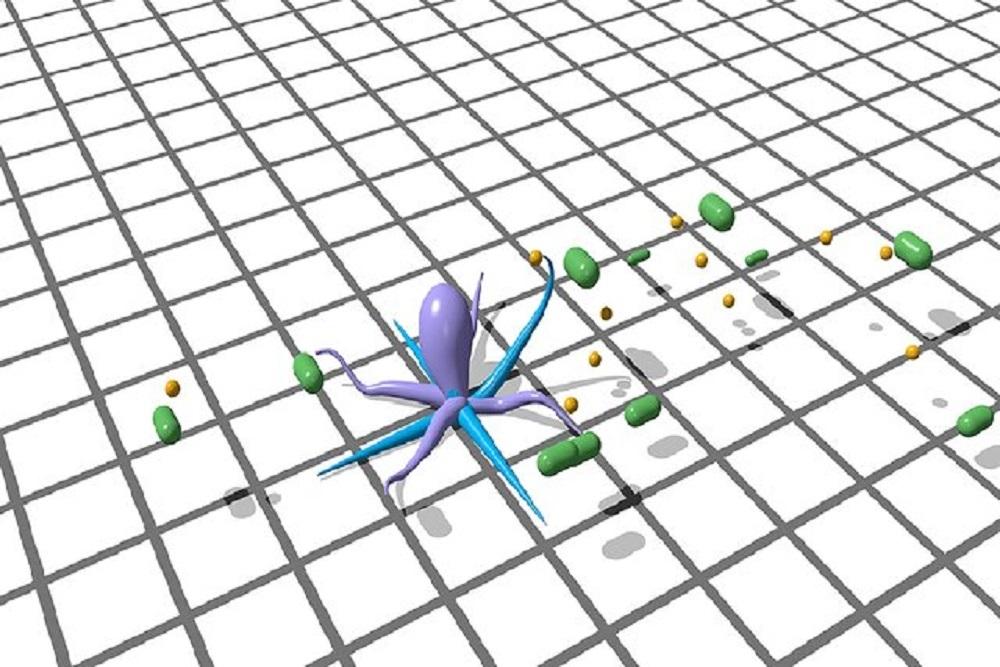
گروه گازولا با الهام از این ساختار سلسله مراتبی مغز، یک اختاپوس ایجاد کردند. در این تحقیق یک اختاپوس مجازی به نام «CyberOctopus» معرفی کردند.
CyberOctopus یک ربات نرم شبیه سازی شده چند پاس است که از یک استراتژی یادگیری ماشینی سلسله مراتبی برای جستجوی غذای مجازی استفاده می کند.
هر بازوی Cyberoctopus به عنوان یک میله انعطاف پذیر تحت پوشش عضلات الاستیک مجازی مدل سازی شد. با فعال کردن ترکیبات مختلف این ماهیچه ها، بدن می تواند منقبض و خم شود یا امتداد یابد و بپیچد.
امواج انقباضات عضلانی می تواند بازوها را به حرکت درآورد تا موجودی را در یک محیط مجازی به حرکت درآورد یا به او اجازه دهد هدف غذایی را بگیرد و آن را به دهان برساند.
گازولا گفت: «یکی از روشهای رایج در فناوریهای یادگیری ماشین و روباتیک، تغذیه یک شبکه عصبی بزرگ به سیستم است و امیدواریم که یاد بگیرد چه کاری انجام دهد.
این روش میتواند در محیطهای سادهای که تعداد محدودی از اقدامات و نتایج ممکن برای ربات وجود دارد، کار کند، اما در اینجا متغیرهای زیادی برای مدیریت وجود دارد. ما آن را امتحان کردیم و متوجه شدیم که کار نمی کند.
Gazzola و Chia-Hsien Shih، یک دانشجوی کارشناسی ارشد در دانشگاه Illinois در Urbana-Champaign، یک سیستم کنترل سه لایه را برای کنترل اختاپوس سایبر طراحی کردند.
پایین ترین سطح به موانعی می پردازد که عملاً هیچ محاسبه ای ندارند و به ماهیچه های اندام دستور می دهد که در هنگام برخورد با چیزی به طور واکنشی شل شوند.
هر اندام به طور جداگانه از دو الگوریتم ساده استفاده می کند که آن را قادر می سازد دو رفتار اساسی رسیدن به هدف غذایی و خزیدن را به طور مستقل انجام دهد.
الگوریتم پیچیدهتری در بالا تلاش میکند تا یک دنباله بهینه از دو رفتار ایجاد کند: دستیابی به غذا و خزیدن، برای کمک به جمعآوری هرچه بیشتر غذا در عین مصرف انرژی کمتر.
محققان پس از تأیید اینکه میتوانند ماهیچههایی را که مدل برای خزیدن در یک محیط مجازی به آن نیاز داشت، فعال کنند، این مدل را با کارهای دشوارتر جمعآوری غذا به چالش کشیدند.
محققان میزان انرژی مصرف شده اختاپوس را نسبت به مقداری که با خوردن دوباره به دست می آورد را ردیابی کردند و دریافتند که روش کنترل سلسله مراتبی آنها با موفقیت اختاپوس سایبر را از طریق چالش های جستجوی غذا هدایت می کند.
همه اینها بدون تکیه بر شبکه های عصبی بزرگ اتفاق می افتد.
Gazola گفت: امروزه تمایل به استفاده از شبکه های عصبی برای همه چیز وجود دارد. شبکه های عصبی سیستم های بسیار قدرتمندی هستند. اگر مشکل فیزیک را درک می کنید، می توانید از این درک به نفع خود استفاده کنید.
خودروهای بیوهیبریدی و موارد دیگر
اگرچه اختاپوس سایبری وظایف ارائه شده در این مطالعه را با موفقیت انجام داد، اما این مدل هنوز تواناییهای حل مسئله خلاقانه یک اختاپوس واقعی را نشان نمیدهد.
گازولا گفت: ربات هایی که بتوانند نحوه فرار از آکواریوم مجازی را در چنین فضای بزرگ و در چنین محیط پیچیده ای کشف کنند، هنوز وجود ندارند.
از سوی دیگر، علم مواد، رباتیک و روشهای یادگیری ماشینی روز به روز قویتر میشوند. بنابراین، در آینده ممکن است بتوان یک هشت پا سایبر با همان هوش یک هشت پا واقعی اختراع کرد.
Gazola رویای ساخت ماشین های نرم بیوهیبریدی را در سر می پروراند که محاسبات را با استفاده از بافت های مصنوعی و زنده انجام می دهند. او گفت: اختاپوس بهانه ای برای توسعه این فناوری برای استفاده گسترده تر بود.
برای مثال، رباتهای نرم میتوانند بهویژه برای ناوبری در محیطهای خشن که روباتهای استاندارد سفت و سخت مشکل دارند، مناسب باشند.
نرمی همیشه هدف در هنگام ساخت ربات هایی است که در کارهای بالقوه پزشکی، پرستاری یا اورژانس با انسان تعامل دارند.
Gazola در مورد طیف گسترده ای از برنامه های آینده گفت: “این یک فضای بزرگ است.” وقتی بدن را درک کردید، می توانید از آن برای حل یک مشکل دشوار به روشی ساده استفاده کنید. این تحقیق نشان می دهد که این امر امکان پذیر است.
این تحقیق در Advanced Intelligent Systems منتشر شده است.